Robots of the
Autonomous System Group (GSA)
|
|
|
|
|
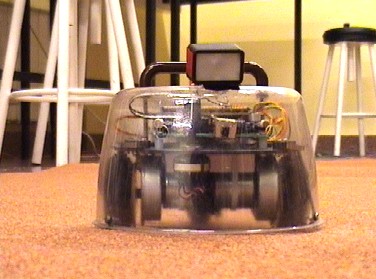
Robot tipo Rug Warrior (apodo: EL BACENILLO). Se ha
utilizado, sobre todo, para corroborar la introducción de diferentes
tipos de ruido en las simulaciones, de cara a minimizar el "reality
gap" entre los comportamientos obtenidos en las simulaciones (mediante
evolución, en nuestro caso) y los comportamientos en el robot real.
Conocedor profundo de sus potencialidades y debilidades: José Antonio
Becerra Permuy ( |
|
|
Robot tipo Prometheus (apodo: BELINDA). Actualmente
descuartizado. Sus "ojos" han servido para pruebas de tracking con
redes neuronales con retardos temporales y como sensores adicionales del
Pioneer 2 DX. |
|
|
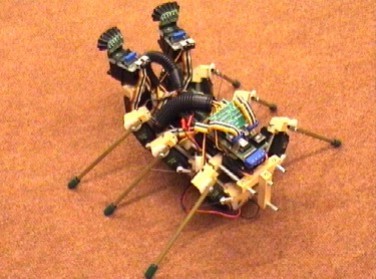
Robot tipo Hermes II de IS Robotics. Se ha utilizado por
parte de Francisco Bellas Bouza ( |
|
|
Pioneer 2 DX (apodo: ADELA, en honor al servicio de
aduanas). Lo ha utilizado, sobre todo, José Antonio Becerra ( |
|
|
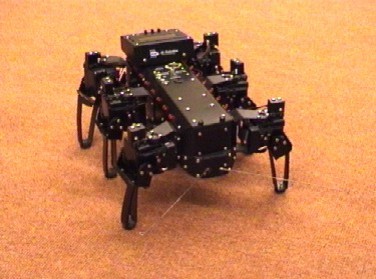
Pioneer 2 AT. Más robusto que el DX. Los
comportamientos del anterior son fácilmente trasladables al 2 AT.
Está controlado por un ordenador externo mediante conexión
inalámbrica y está provisto de cámara con
transmisión de vídeo inalámbrica. |
|
|
|
|
|