SISTEMAS INTELIGENTES
EXERCISE 1
Introduction | Code | Goals
Search algorithms.
The file
search.pl
implements a Prolog program with several search algorithms
directly extracted from the book
Artificial Intelligence: A
Modern Approach [Russell&Norvig03]. In this first
exercise, we will play with 3 uninformed search algorithms: depth
first, breadth first and uniform search. We will use this program
to build different search domains, including the
Romania
roadmap (from the book), the
2-buckets problem and
the
blocks world.
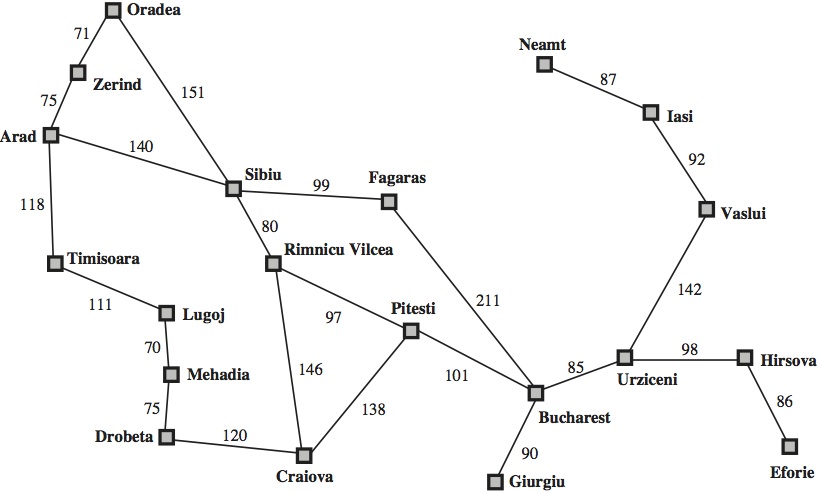
Domain 1: Romania roadmap
This scenario is extracted from [Russell&Norvig03]. We have
the Romania roadmap with the following cities and distances among
them by road:
We want to find a route from Bucharest to Arad (preferrably, the
shortest one).
Domain 2: the two buckets problem
In this example, we have a bucket
a with volume
n
and a bucket
b of volume
m such that
gcd(m,n)=1.
Initially, both buckets are empty. We want to obtain a given
measure
k <= max(m,n) of water and the only
possible actions are:
- fill(X): we can fill bucket X so it gets completely
full, that is, it contains its maximum capacity of water
- empty(X): we can throw all water in bucket X, so it
gets empty.
- pour(X,Y): we can pour water from bucket X into
bucket Y until one of these two things happens first: Y
becomes full, or X becomes empty.
A goal state is any of these three cases: (1) a
contains k litres, (2) b contains k litres
or (3) a and b together contain k litres.
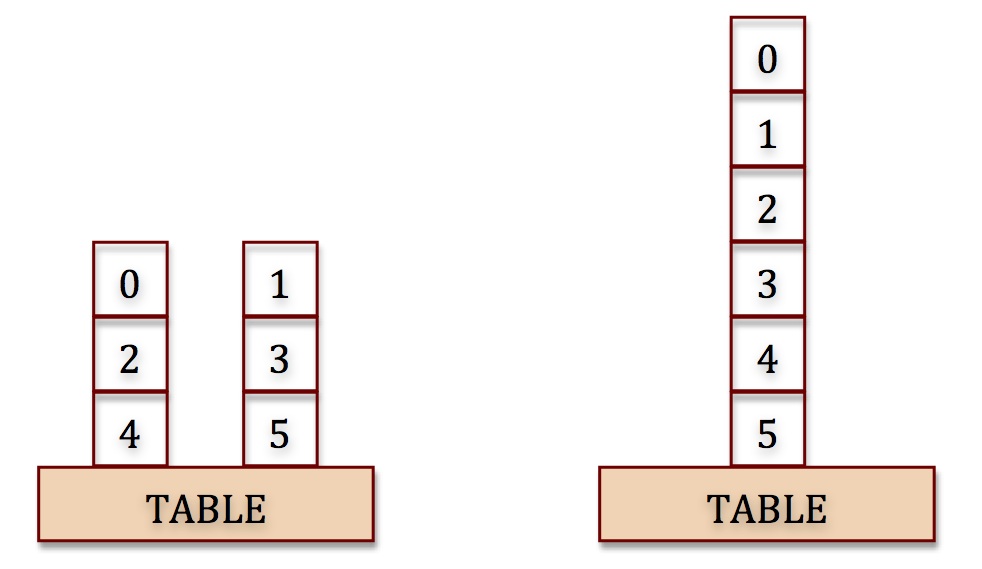
Domain 3: the blocks world
This is a a classical example in Artificial Intelligence. We
have a set of n blocks (enumerated from 0 to
n-1). Each block can be located on the table or
on top of another block, building towers. We can only move
free blocks, that do not have anything above them. The notation
for actions will be move(X,Y) where X is a free
block and Y a free block or the table. In the simplest
version, the table always has room enough for all the blocks.
For our first proofs we will use the following initial and goal
states.
Code
For each domain, we will have to build a prolog file that
implements the following predicates:
| initial(S) |
Fixes the initial state S
|
| goal(S) |
Defines when S is considered to be a goal state
|
transition(S0,A,S1,C)
|
Defines when we can execute action A in state S0, producing state
S1 as a result
and consuming a cost C |
| h(N,X) |
Specifies the heuristic value X for any node
search N. We
will not use it in this first exercise.
|
| write_action(A) |
Prints a given action (used for printing the
obtained plan, if one is found)
|
| write_state(S) |
Prints a given state (only used when printing
a plan in verbose mode)
|
A relevant part of the coding exercise will consist in deciding a
comfortable representation for states and actions. Of course, apart
from these predicates, we can also use as many auxiliary predicates
as we consider necessary.
As an example, we provide the romania roadmap scenario in the file romania.pl. In this case, the state is just
the name of the city at which we are currently located, and the
action is the name of the city where we will go in the next step.
The auxiliary predicate road(X,Y,D)
contains the road database including not only the pairs of
connected cities X,Y
but also the road distance D.
We have also included the straight
distance from Bucharest to each other city (we will use this as
heuristic in the next exercise).
To execute a given domain, we will do the following steps. First, we
load search.pl in the
swipl interpreter as follows:
From the prolog prompt, we can now call
predicate search(F,A)
where F is some
domain file name and A is
some uninformed search algorithm (depth, breadth, uniform). As an example, the
prolog query:
?-
search('romania.pl',depth).
|
invokes the execution of a depth-first (graph) search algorithm
displaying some statistics about the search. Try changing the search
algorithms and compare the different results.
Suggestion 1: open the file search.pl
and have a look at the predicates graph_search and expand. Can you recognize the pseudocode in
[Russell&Norvig03] for the search and expand routines?
Multiple instances: for problems like the buckets riddle or
the blocks world, we may have different problem instances by varying
the initial and goal states or some of the domain parameters (the
capacity of the buckets, the final measure to obtain, etc). We can
separate the domain description and the problem instance in
different files and call predicate search using a list of
files. For instance, for the 2 buckets problem, we can use a file 2b-0.pl
with the data:
initial(...).
% fill here!
goal(...) :- ... % fill
here!
capacity(a,5).
capacity(b,3).
|
a second problem instance 2b-1.pl with
initial(...).
% fill here!
goal(...) :- ... % fill here!
capacity(a,55).
capacity(b,17).
|
and so on. If the common part of the domain description (transition,
h, write_action, ...) is stored in in 2buckets.pl
then, we can make the call
?-
search(['2buckets.pl','2b-0.pl'],depth).
|
and it will work as if the two files were provided altogether.
AUTOMATON MODE
The tool search.pl includes a new module that allows generating
the complete automaton for a given planning problem. This is done
by ignoring the goal predicate which, as expected, expands all
possible nodes, storing the transitions among them too. For using
this feature, download file automaton.pl
and keep it in the same folder as search.pl. You will also need
installing graphviz, a
tool for automated graph drawing: be sure that the executable dot
is in your path. Finally, after loading search.pl, try invoking
the predicate:
?- build_automaton('romania.pl',pdf).
|
This will create a PDF file romania.pl.pdf displaying the
automaton. Be careful with this option, since combinatorial problems
easily blow up in the number of possible states. You can also use
the format XML
?-
build_automaton('romania.pl',XML).
|
that generates a readable input for the animation tool graph searching. Note that
the results obtained by search.pl and by the animation tool may
differ due to differences in the node ordering applied when
inserting in the fringe.
GOALS OF EXERCISE 1
- Create the other two domains 2buckets.pl and blocks.pl. Try
several scenarios for the 2 buckets problem and the blocks
world.
- Make experiments with the 3 algorithms in the 3 domains
- Which is the obtained plan length?
- And which is the obtained cost?
- How many nodes are eventually expanded?