Lógica: práctica 1
Resolviendo el 8 puzzle
El 8-puzzle es un problema muy sencillo en el que tenemos un tablero de 3 x 3 posiciones con 8 pequeñas fichas cuadradas numeradas del 1 al 8 además de una posición hueca. En cada transición, se puede mover hacia el hueco una cualquiera de las fichas adyacentes. El problema consiste en alcanzar una configuración final predeterminada, a partir de una configuración inicial "desordenada". Por ejemplo, podríamos tener la situación de esta figura:
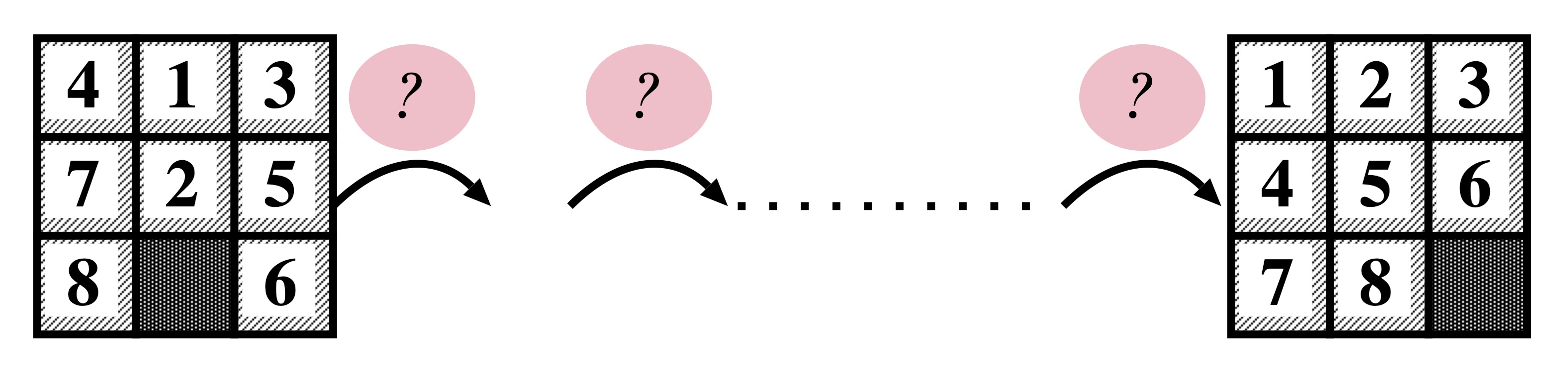
En el estado inicial, los posibles movimientos son tres: mover la ficha 8 a la derecha, la 2 hacia abajo o la 6 hacia la izquierda. Por simplicidad, representaremos más bien el movimiento del hueco (en direcciones cardinales n, s, w, e), de modo que las acciones posibles en este estado inicial serían w (mover el hueco al oeste, intercambiando con el 8), n (mover el hueco al norte, intercambiando con el 2) o e (mover el hueco al este, intercambiando con el 6). Se desea obtener la secuencia de movimientos que nos permita llegar al estado final de la figura derecha, que supondremos que siempre es ese mismo estado meta predertimado. Para el estado inicial del ejemplo, se puede comprobar que un plan válido sería la secuencia de movimientos [w,n,n,e,s,e,s] (de hecho, ese es el plan más corto para llegar a la meta).
Programando el planificador en Prolog
Para representar un estado del puzle, usaremos una
lista de 9 números, de modo que el 0 represente la
posición del hueco. Por ejemplo, el estado inicial de
arriba correspondería a la lista [4,1,3,7,2,5,8,0,6].
Igualmente, el estado meta será siempre la
lista [1,2,3,4,5,6,7,8,0].
El predicado principal que debemos implementar será plan(Modo,S0,Plan)
donde: Modo es un dato de entrada
fijando el tipo de algoritmo que vamos a usar (podrá
ser iter, anchura, profund), S0
es una lista de entrada conteniendo el estado inicial,
y Plan es una lista de acciones conteniendo
el plan final obtenido. Ese predicado hará llamadas a
otros, dependiendo el tipo de algoritmo a programar.
Otro predicado esencial del que haremos uso es expandir(S0,
Accion, S1) que nos debe devolver, para
cualquier estado S0, todas las combinaciones
de Accion válida y estado siguiente S1 al
que nos lleva esa acción. Como ejemplo de
funcionamiento, tendríamos:
?- expandir([4,1,3,7,2,5,8,0,6],A,S).
A = n,
S = [4, 1, 3, 7, 0, 5, 8, 2, 6] ;
A = e,
S = [4, 1, 3, 7, 2, 5, 8, 6, 0] ;
A = w,
S = [4, 1, 3, 7, 2, 5, 0, 8, 6] ;
false.
Para hacer pruebas, usaremos estos 3 posibles estados iniciales:
initial1([1,2,3,7,4,6,5,0,8]).
initial2([4,1,3,7,2,5,0,8,6]).
initial3([1,6,2,3,0,8,4,7,5]).
Algoritmos de anchura y de profundidad
Para los algoritmos anchura y profund
usaremos un mismo predicado llamado buscar que
tiene el siguiente aspecto buscar(Modo,Nodos,Vistados,Plan)
cuyos argumentos son:
- Modo = será anchura o profund
- Nodos = es una lista de elementos de la forma "nodo(P,S)" donde P es el plan parcial obtenido hasta el momento, y S es un estado dado. Esta lista contiene los estados que todavía se van a explorar. Inicialmente, la lista tendrá el aspecto [nodo([],S0)] de modo que S0 es el estado inicial y el plan parcial por ahora es vacío.
- Visitados = es una lista con todos los estados que hemos expandido hasta el momento. Inicialmente será vacía [].
- Plan = es el plan final, con la solución del problema
El modo de operar del predicado buscar es el siguiente:
- Tomamos el primer nodo n(P,S) de Nodos. Si el estado S es el meta, podemos parar y devolvemos el plan P
- Si el estado S no es el meta, pero ya existe en la lista de Visitados, entonces lo ignoramos y pasamos a contemplar el siguiente nodo en Nodos
- Si S no es meta ni ha sido visitado, entonces
recopilamos en una lista de Expandidos todos
los nodos que se pueden expandir a partir de S. Para
ello, podemos usar
findall(nodo([M | P],S1),expandir(S,M,S1),Expandidos)
Si tenemos el algoritmo de profund, la lista de Expandidos se añadirá a la cabeza de la de Nodos, mientras que si tenemos el de anchura, los expandidos se añaden al final de los Nodos. Continuamos la búsqueda anotando el estado S como visitado y llamando de nuevo a buscar.
Algoritmo de profundización iterativa
El tercer algoritmo iter implementará la
búsqueda por profundización iterativa. La idea es usar
un algoritmo de backtracking con un límite de
profundidad. Programaremos el predicado busca_limite(N,Max,S0,Plan0,Plan)
que realizará una búsqueda por backtracking hasta
un límite Max. El argumento N es la
profundidad actual (comenzaremos en 0), mientras que
S0 es el estado inicial. La lista Plan0 lleva el plan
obtenido hasta ahora (de forma acumulada) y comienza
siendo []. Por último, Plan devuelve el plan final
obtenido. La idea es que, si N>Max, la búsqueda se
detiene obligatoriamente.
Una vez que busca_limite esté funcionando,
la búsqueda iter realizará llamadas sucesivas
a busca_limite comenzando con Max=0 e
incrementando el valor de Max de uno en uno hasta que
aparezca algún plan.
Entrega y evaluación
Esta práctica tiene una puntuación máxima
de 2 puntos (20% del total del curso). La
práctica se realizará preferentemente en grupos de 2
alumnos. La entrega se realizará en una tarea del
Campus Virtual (moodle): es suficiente con realizar la
entrega en una de las dos cuentas de alumnos, pero el
código debe incluir en las primeras líneas en
comentarios los nombres de los dos componentes del
grupo. Fecha de entrega: 24 de
abril de 2026 (23:59).