Lab Assignment #2
Taxi routing
ASP multiagent planning
Introduction
- A taxi cannot drive through a building cell
- Two taxis cannot be at the same time in the same
cell
- Two persons cannot be at the same time in the same cell. This also forbids simultaneously having, at the same cell, one person inside a taxi and another one outside the taxi
- Two adjacent taxis cannot swap their positions
- move (up, down, left or right)
- pick a passenger (if the taxi is free and there is a person in the same location)
- drop a passenger (if there is one inside the taxi)
- wait
What to do
Step 1. Each input instance is an ASCII file containing a rectangular grid with the following format. The file contains n lines (the rows) and each line contains m characters (the columns) ended by a newline. Each cell contains a character that can be:
- . =
empty cell
- # = a building
- X = a station
- a,...,z = a passenger
- 1,...,9 = a taxi
For simplicity in the input notation, we assume that,
initially, all stations are empty, all taxis are free,
and all passengers are in a cell without taxi.
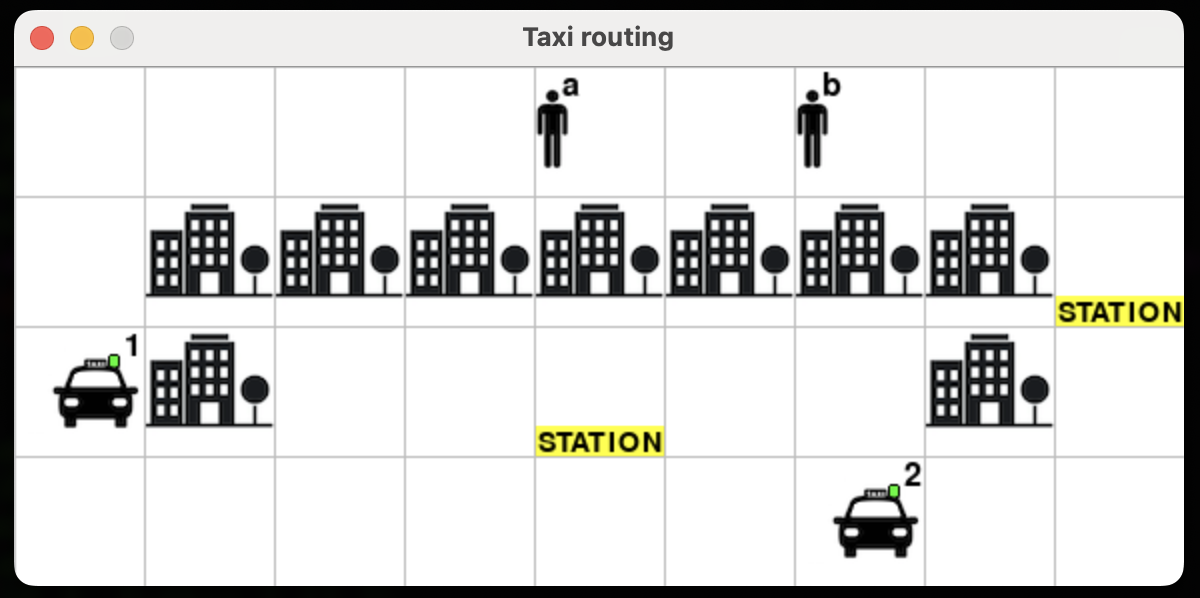
The following shows the input format for the initial
configuration above, also contained in the example file
domain.txt:
| ....a.b.. .#######X 1#..X..#. ......2.. |
The file extaxi.zip contains several input files and their solutions.
Step 2. Write a python program encode.py to transform each input ASCII file into a logic program containing facts. For instance:
| python3 encode.py dom01.txt
domain.lp |
will transform the example above into the set of facts for the predicates you decide to use for representing the problem. The file domain.lp can only contain facts and constant definitions, but no conditional rules or constraints.
Step 3. Encode the planning problem in telingo, but separate the general encoding taxi.lp from the different problem instances dom01.lp, dom02.lp, you try. Each execution would look like
telingo taxi.lp domain.lp
Notice that each problem instance may have now multiple solutions or valid plans. The plans must be expressed as sequences of sets of following actions move(T,u), move(T,d), move(T,l), move(T,r), pick(T), drop(T), wait(T). For instance, a possible plan printed by telingo for the example above can look like file solution.txt.
Finally, if you have installed the python library pygame, you can also draw a graphical representation using the files drawtaxi.py and picstaxi.zip as follows. First, unzip de pictures file, and then call the program using a domain file domXX.txt and an solution file just containing the text output generated by telingo. As an example, try:
python3 drawtaxi.py domain.txt solution.txt
Step 4. Experiment with additional constraints to reduce the combinations to be tried. For instance, try to write the heuristic rule "never pick the same person twice in the same taxi". Optional: try writing these rules using temporal operators within &tel{...} expressions.
Assessment and Delivery
The maximum grade for this exercise is 15
points = 15% of the course. The deadline for
delivery is Monday,
December 15th, 2025 using the MOODLE
assignment. Upload a zip file with all the code, examples
and a PDF file explaining the exercise together with your
answers to the questions included in this statement.
Exercises can be made by groups of 2 students at most. If
so, only one student is required to deliver the files in
moodle, but all source files must contain the names of the
two group members.