SISTEMAS INTELIGENTES
Práctica opcional en Prolog: robot
viajante
El ejercicio opcional en Prolog consiste en resolver el problema
descrito en el boletín P3.pdf sustituyendo el
uso de la herramienta graphsearch por la codificación del problema
en Prolog usando la aplicación search.pl, como hemos hecho en los
ejemplos anteriores. Para no variar demasiado el ejercicio, los
datos de entrada (distancias mínimas entre localidades) se
calcularán también a mano y se introducirán usando el predicado route(X,Y,D) donde X e Y
son dos localidades y D la
distancia. Al igual que en ejercicios anteriores, para programar el
ejercicio en Prolog será necesario elegir una representación de un
estado y definir los predicados initial, initial,
goal, transition
y la heurística h.
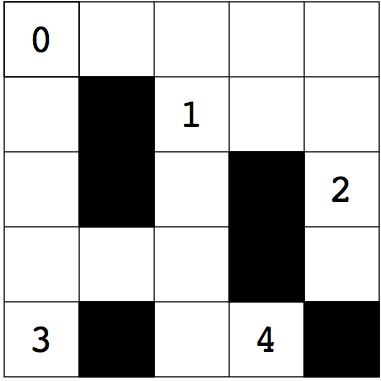
Usaremos dos escenarios de entrada diferentes, el contenido en el
ejercicio P3.pdf, y este segundo escenario:
Evaluación y entrega
Los ejercicios serán realizados preferentemente
en grupos de 2 alumnos. Para la entrega: enviar todos los archivos
fuente sin comprimir junto con un archivo texto o PDF
explicativo como adjuntos en un correo electrónico al correo de
Pedro Cabalar. La calificación máxima es de 1.5 puntos = 15%
de la asignatura. La fecha límite de entrega es el viernes 24 de marzo de 2017,
23:55h.