Examples of evolved biped
controllers using adaptive center-crossing continuous time recurrent neural
networks
The
biped is controlled by a CTRNN. The bias of each node is adjusted, in each
iteration of the recurrent network, to the value that defines the
center-crossing condition [1][2], as it is changed towards the negative value
of the incoming activation at time t. Thereby, all the nodes will be
near the maximum sensitivity regions to induce activation changes.
We
have used the evolutionary robotics methodology [3][4] to obtain the neural
controllers. We used a standard genetic algorithm, using a mutation operator
and a rank-based method as selection operator. Each CTRNN is codified by a
vector that includes the connection weights and the bias and time constants
associated to each neuron. With the use of the run-time adaptive biases all the
individuals of the genetic population present a rhythmic behavior, so the
genetic algorithm has more NNs to fine-tune, obtaining higher fitness
controllers in fewer generations.
Example
of a locomotion behavior obtained by means of the GA (displayed with two
different speeds):
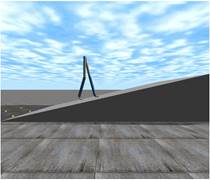
Example
of a locomotion behavior obtained with the robot on a
slope:
In
addition, the coefficient for bias adaptation determines how fast each node is
adjusted to the center-crossing condition. Thus, higher values in the
coefficient can force cyclic behaviors with shorter periods, and vice versa.
Hence, the rhythmic of the locomotion behavior can be adjusted dynamically,
providing a form of external control. The next videos correspond to different
biped behaviors with such control of the coefficient.
The
next videos show several walking behaviours obtained by training the CTRNNs
with different adaptation coefficients. It can be observed the differences of
the gaits among them: with a lower coefficient it is appreciated a longest
step, whereas, as the coefficient is increased, the period of the rhythmic
behaviour decreases showing a more human walking behaviour.


- [1] Beer, R. (1995), "On the Dynamics of Small Continuous
Time Recurrent Neural Networks", Adaptive Behaviour 3(4):
469-509.
- [2]
Mathayomchan, B., and Beer, R. (2002), "Center-Crossing Recurrent
Neural Networks for the Evolution of Rhythmic Behavior", Neural
Computation 14: 2043-2051.
- [3]
Floreano , D. and Mattiussi, C. (2008), Bio-Inspired Artificial
Intelligence, MIT Press.
- [4]
Nolfi, S. and Floreano, D. (2000), Evolutionary Robotics, MIT
Press.